|
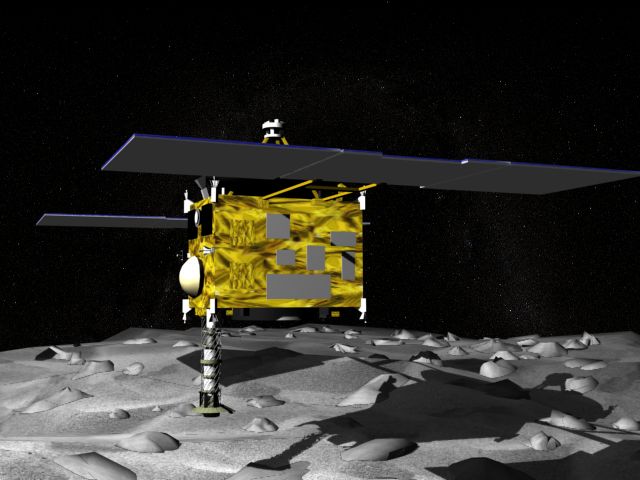
Here in English ! 探査機「はやぶさ」は2005年9月12日に小惑星「イトカワ」に到着し,その後近傍からの全球マッピングを含む詳細な観測が行われ,2005年11月1日に降下・着陸(タッチダウン)候補地が公表されました. 発表された候補地は,「ミューゼス海」(上図のA点)および「ウーメラ域」(上図のB点)の2ヶ所です. 11月9日には「イトカワ」に70mまで接近し,それぞれの地域の近接写真が撮影されました.
これらの写真を見ると,遠くからでは平坦に見える「ミューゼス海」でさえも,数メートルの大きさの岩塊(boulder)が散乱しており,「ウーメラ域」では非常に大きな岩塊が累々と積みあがっている様子がうかがえます. タッチダウン・サンプリング(表面への降下・接地による試料採集)は非常にチャレンジングな試みであり,相当なリスクを伴います.上記ような表面の詳細な様子は,現地へ到着してみて初めてわかったことですが,「はやぶさ」の開発チームは,そのはるか以前(私自身が最初にサンプリング方式の検討ワーキンググループに参加したのは1995年でした)から,様々な状況を想定し,リスクを可能な限り小さくする方策を考え,試験やシミュレーションによる評価を行い,探査機の設計を行いました. 本ページでは,表面の凹凸がやや激しい場合の検討結果について紹介します. 下に,2つの特徴的なケースについてのコンピュータグラフィクスを示します. (図をクリックすると動画がスタートします.)
ここに示すグラフィクスは,単なるイメージアニメーションではありません. 私たちが現時点で予測できる最大限の知識に基づいた仮定のもとで,力学的に 起こり得る運動を厳密に評価したものです.なお,表面地形については,「フラクタル」とよばれる数学的な手法によって仮想的に生成したモデルであり,イトカワの表面データではありません. 基本的な考察については,既に公表しているページをご覧ください. 「はやぶさ」の開発段階においては,サンプラーホーンと呼ばれる長さ1mのプローブが接地する小惑星表面の最大傾斜角度を30度と想定して,試験を実施しました.しかし,数値解析では更に傾斜が大きい場合についても,検討を行っています.具体的には,探査機の最終降下速度,表面の傾斜角,および摩擦の大きさについて,これらの条件を様々に組み合わせて幅広く網羅的に解析を行うことにより,安全性の評価を行いました. 上記ケースAおよびBは,いずれも接地点の傾斜角が50度を越える場合ですが,これらの場合では,探査機の運動が危険な状態に陥ることは無いと考えられます.動画では,サンプラーホーンのばね特性が有効に働いている様子がわかります. 表面の起伏がさらに激しい場合,サンプラーホーンの先端が接地する前に,探査機の一部が小惑星と接触してしまう可能性が考えられます.よって,タッチダウン点近傍の表面の起伏の高さ(深さ)は,最大でも1m以下でなければなりません.特に「はやぶさ」本体には,長さ約4.2m,幅1.4mの太陽電池パドルが左右に取り付けられています.万一,起伏の凸部がパドルに接触し太陽電池を損傷してしまうと,地球帰還のための電気推進(イオンエンジンによる推進)に問題を生じます.よって,「はやぶさ」には Fan Beam Sensor (FBS) と呼ばれる扇型の検出域を持つセンサーを装備して,タッチダウンの際には,太陽電池パネル直下の障害物検知を行います.もしも障害物がパネルから一定の距離以内に検出されると,直ちに,探査機の下面に取り付けられた4個のガスジェットスラスタを噴射して,上昇離脱(アボート=タッチダウンを中止)します. 下記のシミュレーション動画は,FBS障害物検出によるアボートの例を示しています.シミュレーションでは,峡谷のように見えるフラクタル地形を用いていますが,平坦な表面上に突然大きな岩塊が突き出しているような場合(タッチダウンの第一候補である「ミューゼス海」域でもこの可能性は十分に考えられます)にも,FBSを用いた危険回避システムは有効に機能するものと考えられます. (図をクリックすると動画がスタートします.)
[ムービー一覧(2005年11月公開分)] [ムービー一覧(2005年9月公開分)] [ムービー一覧(2003年5月公開分)] なお,ここに示すシミュレーション結果は,東北大学吉田研究室の責任に おいて実施し公表するものであり,JAXA公式発表によるものではありません. 「はやぶさ」ミッションについての公式な最新情報は, JAXAのホームページをご参照ください.
主な研究内容 宇宙フリーフライングロボットの研究 宇宙ステーション搭載ロボットの研究 月・惑星探査ローバーの研究 小惑星サンプルリターンミッション MUSES-C (c) The Space Robotics Lab, Tohoku University, JAPAN All right reserved.
For any question, please contact here. |